当前位置:首 页 > 公益服务 > B部-作业;运输
专利号:2019104418531
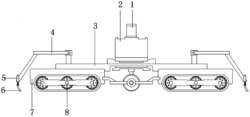
本发明公开了一种磁吸附的爬行机器人,其结构包括驱动电机、驱动装置、机体、活动支架、弹簧刮板架、刮板、绝磁支座、磁吸附装置,本发明具有的效果:通过驱动装置和磁吸附装置相配合,能够使磁吸附爬行机器人在对金属表面进行除锈工作过程中,能够防止金属铁屑被永磁体吸引,避免了永磁体对金属表面的磁吸力逐渐减弱以及后期将铁屑从永磁体上剥离需要浪费大量时间,以此来提高磁吸附爬行机器人在船舶表面爬行的稳定性,从而提高磁吸附爬行机器人的工作时间和作业效率。