
专利号:2018218820403
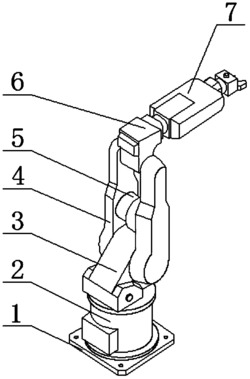
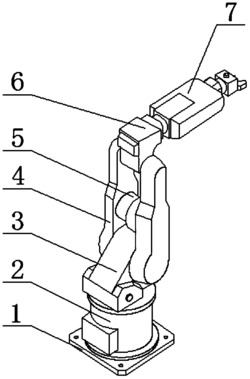
本实用新型公开了一种用于采菠萝的机械手,包括底座和动力座,所述底座的顶部固定连接有动力座,所述动力座的顶部固定连接有大臂,所述大臂的侧面转动连接有支撑杆,两个所述支撑杆之间的中间连接有连接轴,所述连接轴的上方设置有小臂,所述小臂的右端转动连接有机械爪,发出工作指令后,处理器会进行数据的处理,并使得驱动电机工作,驱动电机就会使得大臂和小臂进行移动,将机械爪慢慢靠近需要采摘的菠萝,之后距离传感器会检测到菠萝的距离,处理器会进行分析并发出指令,使得两个剪头位于菠萝根茎的位置并靠拢,将能够将菠萝采摘下来,采摘工人的手不会直接接触菠萝,也就不会出现手部被菠萝叶割伤的情况。
