专利号:2019107279687
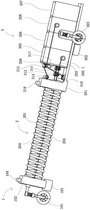
本发明涉及一种全向弯曲仿尺蠖软体蠕动机器人,其解决了现有仿尺蠖机器人灵活性差、柔顺性差和活动自由度低的技术问题,其包括前肢、躯干和后肢,躯干包括躯干弹簧、左钢丝绳、右钢丝绳、上钢丝绳和下钢丝绳;躯干弹簧的前端与前肢固定连接,后端与后肢固定连接;躯干弹簧上沿圆周均匀设有四组孔道,左钢丝绳、右钢丝绳、上钢丝绳和下钢丝绳分别穿过躯干弹簧的四组孔道,左钢丝绳、右钢丝绳、上钢丝绳和下钢丝绳的前端分别与躯干弹簧的前端固定连接;后肢设有驱动装置,左钢丝绳、右钢丝绳、上钢丝绳和下钢丝绳的后部分与驱动装置连接。本发明线驱动弹簧式的软体躯干可实现机器人空间大范围弯曲与伸缩,广泛用于可连续变形的软体机器人领域。
