专利号:2020113958067
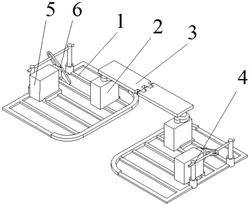
一种光电混合驱动的足式静电吸附爬壁机器人,属于爬壁机器人领域,本发明为了解决现有静电吸附式爬壁机器人由于自身重量较大,削弱了爬壁机器人的负载能力问题;以及履带式静电吸附爬壁机器人在转弯时履带式静电吸附爬壁机器人电极面会与壁面发生磨蹭现象,破坏静电吸附力,导致机器人掉落壁面的问题,本发明所述机器人包括两个足式结构和一个连接组件,所述足式结构包括足板,足板的下表面上贴附有一层柔性电极,柔性电极通过导线与贴附在连接组件上的高压模块相连,足板的上表面还安装有一号舵机,一号舵机中输出轴的端部与连接组件的一端固定连接。本发明主要用于机器人在垂直壁面上附着爬行,并能携带工具完成一定的作业任务。
