专利号:2018115786157
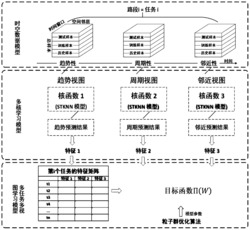
本发明公开了一种基于多任务多视图学习模型的短时交通预测方法,包括如下步骤:步骤一,针对每个道路片段单独构建时空数据模型;步骤二,构建多核学习模型;步骤三,采用多任务多视图特征学习模型,构建目标函数;步骤四,引入粒子群算法,对步骤三获得的目标函数进行优化;步骤五,对于任意道路片段重复步骤一和步骤二以获得输入特征,将输入特征带入到优化后的目标函数,实现对任意道路片段进行短时交通预测。本方法实现了短时交通的高效预测,解决了时空异质性和模型的全局预测能力无法达到均衡的问题,解决了模型的参数优化问题,可以广泛应用于城市规划、人员流动调查、汽车导航、应急响应、时空可达性分析和交通污染建模。
