专利号:2016104763985
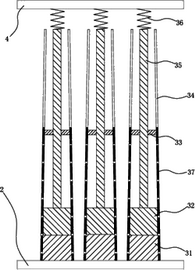
本发明电磁关节机械手涉及一种柔性机械手,特别是涉及一种用于抓取纸杯、喂食病人的机械手。其目的是为了提供一种结构简单、成本低、操作简便、适应能力强、能够根据被抓物的大小进行微调、适应并补偿患者姿态的微小变化的电磁关节机械手。本发明电磁关节机械手包括电磁柔性关节(1),所述柔性筒(34)底部与下板(2)固定,柔性筒(34)内腔自下到上依次设有电磁铁(31)、永磁铁(32)和顶杆(35),所述电磁铁(31)固定在柔性筒(34)底部,所述永磁铁(32)以柔性筒(34)内腔为导轨,永磁铁(32)顶部与顶杆(35)底部固定,顶杆(35)顶部与上板(4)连接。
