申请号:2020103107487
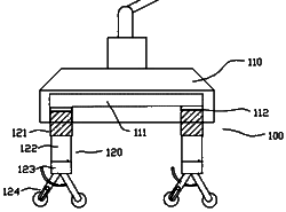
本发明公开了一种消防机器人主机,包括机体(110)以及连接在机体上的四个动力臂(120),动力臂驱动主机移动,动力臂包括与机体连接的活动杆(121)、与活动杆连接的固定杆(122)与固定杆连接的转动杆(123),转动杆连接有滚轮臂(124),滚轮臂的末端设有滚轮,滚轮能够被滚轮臂驱动转动,滚轮臂包括有第一滚轮臂(1241)和第二滚轮臂(1242),第一滚轮臂和第二滚轮臂的角度可变化,第一滚轮臂上设有弧形套(12411),第二滚轮臂上设有弧形杆(12421),弧形杆插入弧形套中并且和弧形套刚好契合,弧形杆的末端和弧形套的底部形成一个密封的空气腔。
