申请号:2020108530872
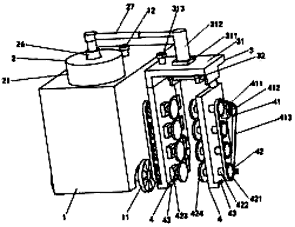
本发明公开一种自适应式表面清洁机器人,包括行进装置、转动装置、转向调节装置和两清洁装置,行进装置顶部安装有转动装置,转动装置和转向调节装置固定连接,转向调节装置左右两侧分别安装清洁装置,转动装置能够调节转向调节装置和清洁装置的位置,便于本发明进行工作,转向调节装置上的位置调节机构能够调节两清洁装置位于玻璃护栏两侧合适的位置,同时清理玻璃护栏内外表面,也可以调节其中一个清洁装置旋转一百八十度以适应清理单面待清理面的情况,实现了自适应不同待清理面的功能,清洁装置底部设置的地面缝隙清理机构能够清理玻璃护栏台阶的卫生死角,达到全面清理目的。
