申请号:2019103542480
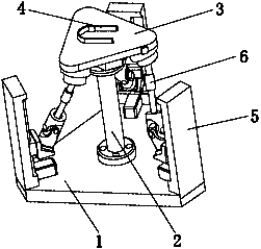
本发明公开了一种具有防惯力倾倒平衡的脚踝康复机器人,其结构包括底座、主轴杆、平行板、脚掌定位软槽、直线运动模板、运动铰链。有益效果:本发明通过平行板内部设有的环形气囊在橡胶球随使用者活动轨迹运动时呈挤压状,从而将扁圆体推向使用者活动轨迹的反方向,以此增加其训练过程中的稍微平衡,从而防止因用力过猛在惯性的作用下,延长下滑(上翘)导致二次损伤,利用防滑扣圈其内部置有的永磁球在运动铰链的支配下加大摩擦力,同时其在运动铰链的驱使下与钢球产生一定的挤压力,有效的防止使用者在做康复训练时因零件的灵活性无法按照自我意愿及时返回,从而导致因惯力大回程较为吃力,以此确保患者在使用时不会造成惯性力的伤害。
