申请号:2020107557685
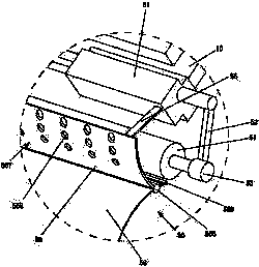
本发明涉及一种玻璃幕墙清洁机器人。所述玻璃幕墙清洁机器人包括框架、两组爬行脚、浸湿组件与清洁组件,两组爬行脚分别安装于框架的相对两侧并利用真空吸附固定于玻璃幕墙上,浸湿组件包括液体罐、阀门、固定架与浸湿辊轮,液体罐安装于框架上,固定架安装于框架上,浸湿辊轮转动地安装于固定架的底部,用于抵持玻璃幕墙,液体罐通过阀门与浸湿辊轮连接,浸湿辊轮包括弹性内筒与柔性包覆层,弹性内筒的横截面为椭圆,弹性内筒的周面开设有多个溢出孔,柔性包覆层包覆于弹性内筒的周面上。所述玻璃幕墙清洁机器人的安全性较高。
