申请号:2021104932876
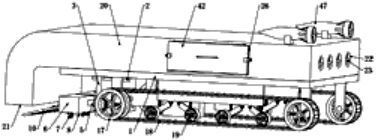
本发明提供一种用于清理船体附着物的水下机器人,包括车架,车架的底部安装有T形滑轨,T形滑轨上滑动设置有第一推板,第一推板上沿车架的竖直方向设置有若干滑槽,若干推杆的一端分别滑动设置在若干滑槽内,推杆上均安装有两个限位块,限位块分别位于第一推板的两侧,且两个限位块之间的间距大于第一推板的厚度,第一推板的前端设置有若干个用于清理船体附着物的清理组件,若干清理组件之间相互铰接,推杆的另一端分别与清理组件连接,清理组件的推杆的数量相同且一一对应;第一推板的后端设置有用于推动第一推板及清理组件往复运动的驱动组件。本申请能够在水下对船体表面的附着物进行清理,减少了船舶进入船坞清理的时间,节约了清理成本。
