专利号:2021102800603
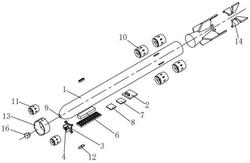
本发明公开了一种水下维度数据巡检机器人及方法,机器人包括机体,机体上设置有固定推进器、矢量推进器,机体的尾端设置有尾翼;机体的头部下方通过相机稳定云台设置有全景相机;机体的内部设置有飞控系统、接收机、电池固定平衡重,机体内部设置有与中心控制板相连接的探伤模块、图传模块,飞控系统通过电调分别与固定推进器、矢量推进器连接,机器人的工作方法实现了水下巡检,通过飞控系统给固定推进器、矢量推进器以及探伤模块、相机稳定云台传递信号,实现机器人的运行;本发明的水下维度数据巡检机器人体积较小,具有更广的水下活动范围,灵活性强,续航时间长,用相对较低的成本实现了小体积下各种功能的整合,市场潜力相当巨大。
