专利号:2016108278315
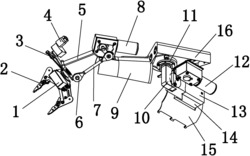
本发明公开了一种助残脚控机械手臂,包括大臂支套、小臂支套、钳爪;大臂支套的左侧上端、右侧上端分别设置有大支臂、电源装置;电源装置的上端设置有电路板;大支臂的上端设置有肘部驱动电机,用于实现大支臂的上下翻转运动;钳爪的上端设置有钳爪开合驱动电机,用于控制钳爪的张开与闭合,实现对物品的抓放处理;钳爪的右端设置有连接板;连接板的上部设置有钳爪旋转驱动电机,用于带动钳爪进行里外翻转运动,以适应不同角度物品的拿放;小臂支套的左部上端设置有腕部驱动电机,用于实现小臂支套相对于钳爪的上下翻转运动。本发明具有四个自由度的运动变化,能帮助病人解决日常的进餐、饮水等问题,适合双手残疾而双脚健全的人使用。
