专利号:2019109478420
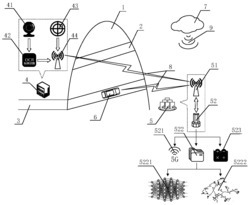
本发明公开了一种适用于多种自动驾驶等级车辆的山区道路安全控制系统及方法,属于自动驾驶车辆控制管理领域。本发明在山脚下设置了一处边缘计算基站,将山路上行驶的无人驾驶车辆统一交由边缘计算基站进行管理控制,无人驾驶车辆行驶时的计算决策全部由边缘计算基站来完成。由于边缘计算基站中存有高精度山区地图,且可以获取山区所有车辆的位置信息,并具有强大的计算能力,使得无人驾驶车辆在山区边缘计算基站控制下的行驶相对于无人驾驶车辆自身独立控制行驶变得更加的安全可靠。本发明具有设备数量少,控制方法简单,控制可靠,易于实现的特点,能够很大程度上保证山区车辆行驶的安全性。
