专利号:2017114291275
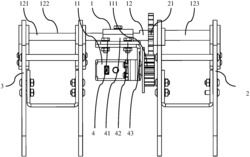
本发明涉及机器人领域,具体涉及了一种清洁爬壁机器人的腰部结构,包括摆腿装置、第一步行腿和第二步行腿;摆腿机构包括摆腿驱动装置和腰部转轴,腰部转轴的中部和固定端的侧壁均设有限转平台,摆腿驱动装置的连接架设在腰部转轴的中部;第一步行腿的端部嵌套并转动连接于腰部转轴的活动端,第二步行腿的端部上设有固定孔,腰部转轴的固定端穿过并卡接于固定孔;第一步行腿上固设有摆腿齿轮,摆腿驱动装置的输出轴设有输出齿轮,输出齿轮和摆腿齿轮啮合。本发明清洁爬壁机器人的腰部结构通过一个驱动装置实现两条步行腿的相互摆动的功能,而且由于其活动部件较少,大大降低了清洁爬壁机器人发生故障的几率,确保其稳定地工作。
