专利号:2022109565596
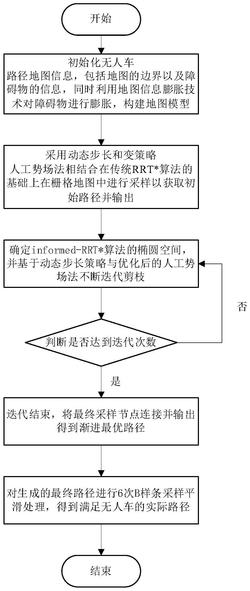
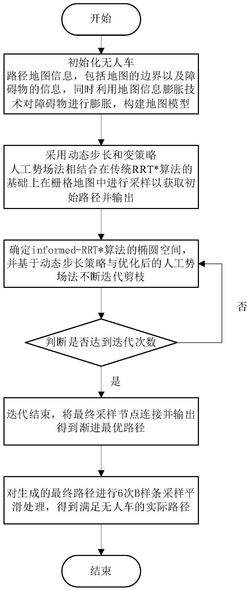
本发明涉及一种基于动态变策略informed‑RRT*的无人车路径规划方法。所述方法包括:首先,利用地图信息膨胀技术对障碍物进行膨胀,初始化地图信息,根据动态步长策略和变策略人工势场法相结合在传统RRT*方法的基础上在地图中进行采样,以获取初始路径;构建椭圆采样区间,随着搜索树在改进informed‑RRT*方法下不断剪枝优化,椭圆范围也在不断地缩小,采样时间也随之减少,最后进行6次B样条曲线拟合优化,仿真验证了所述方法的有效性。本发明能够降低传统informed‑RRT*的盲目性和随机性,减少路径搜索的时间,且规划的路径考虑了安全距离,路线更为平滑,符合无人车动力约束。
