专利号:2022107614009
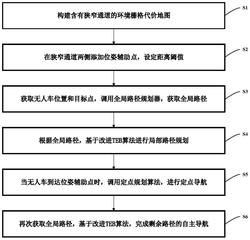
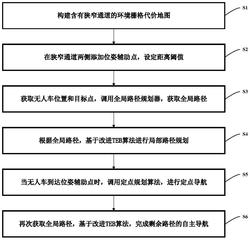
针对狭窄通道通过率较低且无法自主导航的问题,提出一种适用狭窄空间的无人车改进TEB导航方法,所述方法包括:构建含狭窄通道的环境栅格地图;利用改进RRT算法和改进TEB算法分别进行全局路径规划和局部路径规划,完成无人车的自主导航,保证了导航路线的安全性和可行性;通过添加位姿辅助点,在经过狭窄通道时调用定点规划算法,保证了狭窄通道的通过率;利用速度插补控制和S形速度规划分别优化自主导航和定点导航的输出速度,保证了输出曲线的平滑和导航过程的稳定性。通过gazebo仿真实验,验证了改进导航方法的可行性,且无人车在狭窄通道的通过率显著提升,输出自主导航和定点导航的速度曲线,两个阶段的速度曲线波动均小于0.05m/s。
