专利号:2021109652091
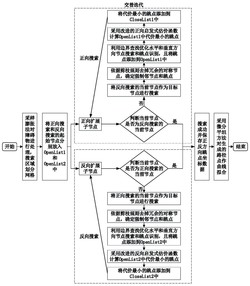
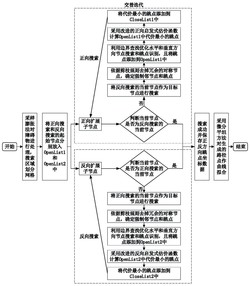
本发明涉及一种基于边界查找的双向跳点搜索无人车路径规划方法。所述方法包括:使用膨胀法对障碍物进行处理,采用栅格法划分搜索区域,将正向搜索和反向搜索的起始节点分别放入OpenList1和OpenList2中,从正向和反向进行跳点交替迭代搜索,利用边界查找优化水平和垂直方向的节点搜索和跳点识别,且将跳点分别添加到OpenList1和OpenList2中,采用改进的正向和反向启发式估价函数分别计算OpenList1和OpenList2中代价最小的跳点,直到正向和反向搜索的当前节点重合,搜索成功并保存正反方向搜索的路径节点即跳点坐标数据,采用微分平坦方法对生成的路径节点作曲线拟合。本发明可有效提高节点搜索和跳点识别效率,减少路径寻优时间,保证路径最优性,避免拟合后的路径与障碍物碰撞。
