专利号:2021107740539
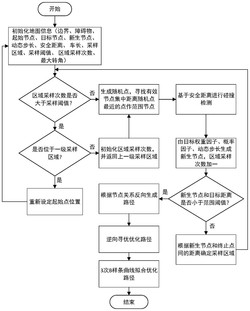
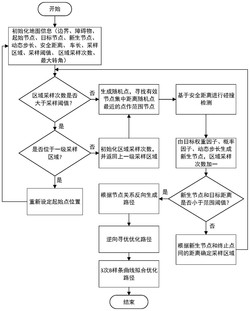
本发明涉及一种基于动态变采样区域的概率目标偏置快速扩展随机树(RRT)无人车路径规划方法。所述方法包括:首先,初始化地图信息,根据动态变采样区域公式判断所处区域;在此基础上进行预留安全距离的碰撞检测,并根据概率目标偏置公式和步长选择公式生成新生节点,重复上述步骤直到满足新生节点和目标节点之间的距离小于距离阈值,反向搜索,输出路径;最后,考虑最大转角约束对输出路径进行逆向寻优和3次B样条曲线拟合优化,仿真验证了所述方法的有效性。本发明能够降低节点搜索的盲目性和随机性,减少路径搜索的时间,且规划的路径平滑符合车辆运动动力学约束。
