专利号:2022112772055
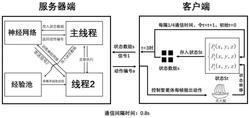
本发明公开了一种考虑海浪干扰的无人艇回收分布式决策仿真系统,完成海洋作业中母船对无人艇的自动回收任务。首先,搭建无人艇回收任务所需的仿真环境;基于DuelingNetwork算法设计决策模块,并针对应用场景优化神经网络结构,使决策模块具有短时记忆功能;实现分布式通信机制,将决策模块置于服务器端,环境模块置于客户端;最后,启动服务器与客户端程序,控制无人艇抽象的智能体完成回收任务。该系统针对实际复杂海况,设计模拟物理交互的仿真环境;采用深度强化学习算法,使得AI控制器应对复杂场景时,具有更强的鲁棒性,且让模型具有迁移学习能力;分布式通信机制将训练与控制独立运行,便于实现离线训练,同时可以实现远程控制效果。
