专利号:2022109594565
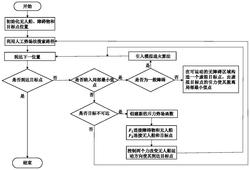
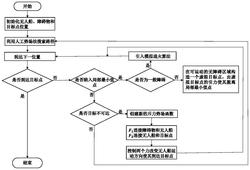
本发明公开了一种考虑虚拟目标点的无人船路径规划方法,旨在解决无人船在路径规划中存在的易陷入局部极小值和目标不可达问题。对于目标不可达问题,创建斥力势场函数,根据测算目标与障碍物的间隔,促使目标所受斥力为零,使无人船可以到达目标点处。对于局部极小值问题,对各类障碍引起的局部极小值开展分析,结合模拟退火算法和人工势场法求解一般障碍导致的极小值点问题。针对非一般的U型障碍造成的局部极小值问题,给出虚拟目标点构造算法,通过建立虚拟目标点的改进算法来解决此类问题。仿真结果表明,与其它方法相比,本方法减少了由于斥力太大而导致的路径过长问题,不仅节省时间,而且优化了路径规划,从而加快了算法的速度。
