当前位置:首 页 > 公益服务 > G部--物理
专利号:2022101897451
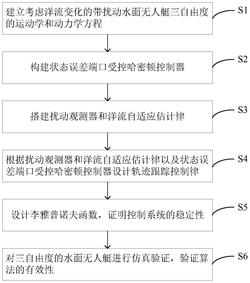
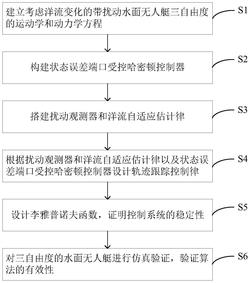
本发明涉及一种水面无人艇轨迹跟踪控制方法,所述方法包括:鉴于水面无人艇在海面航行会受到环境干扰和洋流变化的影响,在对水面无人艇进行三自由度建模时加入洋流变化和环境扰动,同时搭建干扰观测器对干扰进行观测和洋流自适应估计律对洋流进行估计,为了达到能量消耗小的目的,搭建状态误差端口受控哈密顿控制器,进而将干扰值和洋流估计值结合状态误差端口受控哈密顿控制器设计轨迹跟踪控制律,实现水面无人艇精准轨迹跟踪。