专利号:2021107514576
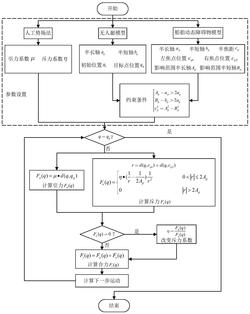
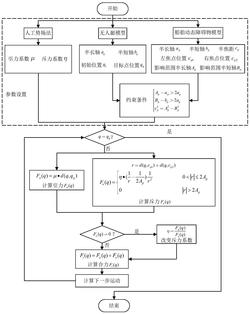
本发明涉及一种水面无人艇动态规划方法,所述方法包括:鉴于水面无人艇在海面上碰到的动态障碍物大多为船舶,根据船舶的形状特性,对其建立椭圆模型;在建立椭圆模型基础上,对椭圆模型进行分析,确定船舶动态障碍物的影响范围,并在影响范围内构建椭圆斥力势场提供斥力,从而引导水面无人艇躲避动态障碍物;进一步考虑船舶动态障碍物运动的不稳定性和不可预测性,水面无人艇需要在短时间内避开动态障碍物,故采用变斥力系数方法,增加斥力,改变合力方向,从而达到快速引导水面无人艇避开动态障碍物的效果。
