专利号:2021115771261
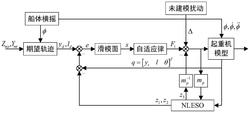
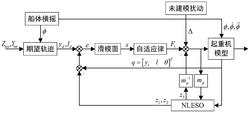
本发明公开了一种基于自适应滑模变结构的船用起重机减摆控制方法,旨在解决船用起重机系统参数发生变化引发的控制器频繁整定控制参数的问题,具体包括:根据船用起重机系统的运动规律,对其动力学建模,采用非线性扩张观测器(NLESO)补偿系统未建模扰动,引入误差函数,获取滑模面的等效控制律,将负载质量等价为估计参数,设计对负载质量有先验认知的自适应律,分析及证明所述方法的渐进稳定性。本发明提升了船用起重机模型的准确性,有效减少了负载摆角,提高了响应速度,同时使系统具有较强的鲁棒性。
