专利号:2021108909760
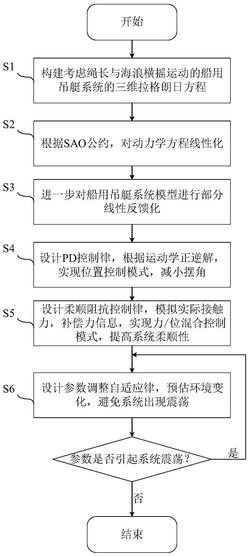
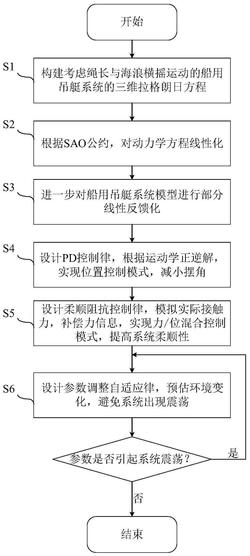
本发明公开一种考虑绳长变化的船用吊艇系统减摆控制方法。解决大型舰船的吊艇系统减摆控制存在响应速度慢和位移饱和而导致传统位置控制效果不佳的问题。包括:首先构建考虑绳长变化和海浪横摇运动的动力学模型,对其部分反馈线性化,设计位置控制模式,减小强干扰带来的误差,但其使系统频繁减摆导致柔顺性下降,其次构建含有期望刚度、期望阻尼和期望质量的二阶环境耦合动力学模型,引入隐形弹力函数,补偿接触力信息;但因环境刚度受到强干扰时变,需要在线调整参数,为了避免参数动态变化引起系统震荡,最后设计环境补偿函数与自适应律,保证系统柔顺性与稳定性。该方法可有效减小摆角,保证工作艇位姿稳定,提高收放效率。
