专利号:202110311537X
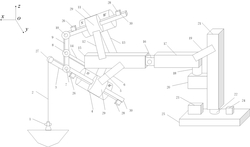
针对船用机械臂工作过程中因干扰产生摆动问题,发明一种基于阻抗控制的船用主动减摆收放机械臂。主要包括减摆锥形吊钩,吊索,减摆机构Y,改进阻抗阻尼器Y,固定件一,固定件二,轴承一,轴承二,减摆机构X,轴承三,改进阻抗阻尼器X,固定件三,固定件四,固定件五,折臂一,轴承四,折臂二,轴承五,固定件六,托架,支柱,轴承六,永磁异步电机,减摆阻抗综合控制箱,母船甲板,位置传感器,滑轮,力传感器,滑块,连杆。设计主动减摆阻抗综合控制系统对被吊物进行主动减摆;采用基于阻抗控制的改进阻抗阻尼器,避免大幅度和高频率减摆出现装置断裂情况,提高了船用收放机械臂效率和安全性。
