专利号:2020112433964
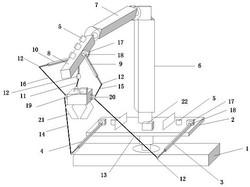
本发明设计一种主动控制恒张力的三连杆式船用自抓放机械臂装置。装置主要包括底座、平衡平台、左平衡臂、右平衡臂、张力传感器、连杆一、连杆二、连杆三、左辅助平衡臂、右辅助平衡臂、主吊索、左平衡索、右平衡索、左辅助平衡索、右辅助平衡索、视觉传感器、吊环、抓钩、PLC控制箱。采用四条平衡索,利用PLC实现主动控制恒张力,并采用视觉传感器的抓钩实现自动抓取收放功能。本发明优点在于使用多个自由度的三连杆式机械臂,扩大抓取范围。同时考虑海洋环境因素干扰力对主吊索、抓钩和被吊物影响。采用四条平衡索,提升减摇效果。运用视觉传感器,船用机械臂可以自动抓取收放被吊物,且相比于人工操作的船用起重机更加智能化,适用于多种运载器。
