专利号:201810455464X
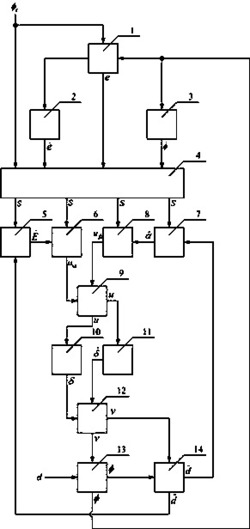
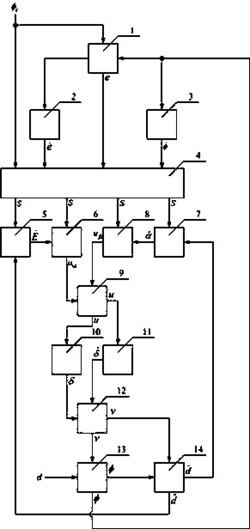
减摇鳍控制器将期望横摇角、微分横摇角、横摇角误差和微分横摇角误差传递给积分滑模变换器。产生积分滑模面后传递给切换自适应律生成器、切换控制器、模糊自适应律生成器和模糊控制器,由切换控制器和模糊控制器分别产生的切换控制律和模糊控制律通过控制信号求和器得到总的升力控制律。经过限幅调节器和RBF神经网络调节器分别得到升力实际输入值与设计输入值偏差以及偏差的估计值,得到受限的升力控制律,实现升力受限的船舶横摇控制。其优点在于针对系统控制量受到实际执行机构限制问题,采用滑模变结构、模糊控制和RBF神经网络控制策略结合优化,实现减摇鳍升力受限的有效补偿。通过仿真实验验证了控制器的可靠性和有效性。
